ErrorChannelV0
Description
The ErrorChannelV0 environment simulates a multi-qubit noisy quantum system where different qubits may be subject to error channels (bitflip errors) with varying probabilities. It is based on the QuantumEnv base class. The agent’s task is to identify and apply corrective single-qubit gates to mitigate the effects of these noise processes and restore the system state to the computational basis state |0…0⟩.
This environment models the challenge of quantum error mitigation/correction in the presence of Bit-flip errors.
The agent interacts by applying X gate to specific qubits. Rewards are based on the probability that the corrected quantum state has returned to the target basis state.
The environment includes a rendering mode that provides a bar plot animation comparing the noisy, corrected, and ideal probability distributions, along with the evolving circuit diagram.
Action Space
The action space is a Discrete( [n_qubits] ) space, meaning the agent chooses:
A target qubit: index in
[0, n_qubits-1]to apply the PauliX correction on.
Example (for 3 qubits):
0→ ApplyXgate on qubit 02→ ApplyXgate on qubit 2
Observation Space
The observation is a probability distribution over all computational basis states of the n_qubits system:
obs \(\in [0, 1]^{2^{n_{qubits}}}\)
with the constraint:
\(\sum_{i} obs_i = 1\)
For example, with 3 qubits, the observation is a length-8 vector:
Index |
Basis State |
Probability |
|---|---|---|
0 |
|000> |
[0, 1] |
1 |
|001> |
[0, 1] |
… |
… |
… |
7 |
|111> |
[0, 1] |
Rewards
The reward is the mean squared error between the target state and the corrected state multiplied by -1:
reward = -MSE(|0…0⟩, |corrected_state⟩)
Maximum reward = 0.0 (perfect correction).
Minimum reward = -(2/2**num_qubits) (highly corrupted).
Starting State
At the start of each episode:
A set of faulty qubits is defined to apply bit flip errors with varying probabilities. (If not specified, a random qubit is chosen.)
The agent begins with no corrections applied.
The first observation is the noisy probability distribution before any corrections.
Episode End
The episode ends if one of the following occurs:
Termination: The obtained reward is 0.0.
Truncation: The system reaches the maximum number of steps (
max_steps, default=10)
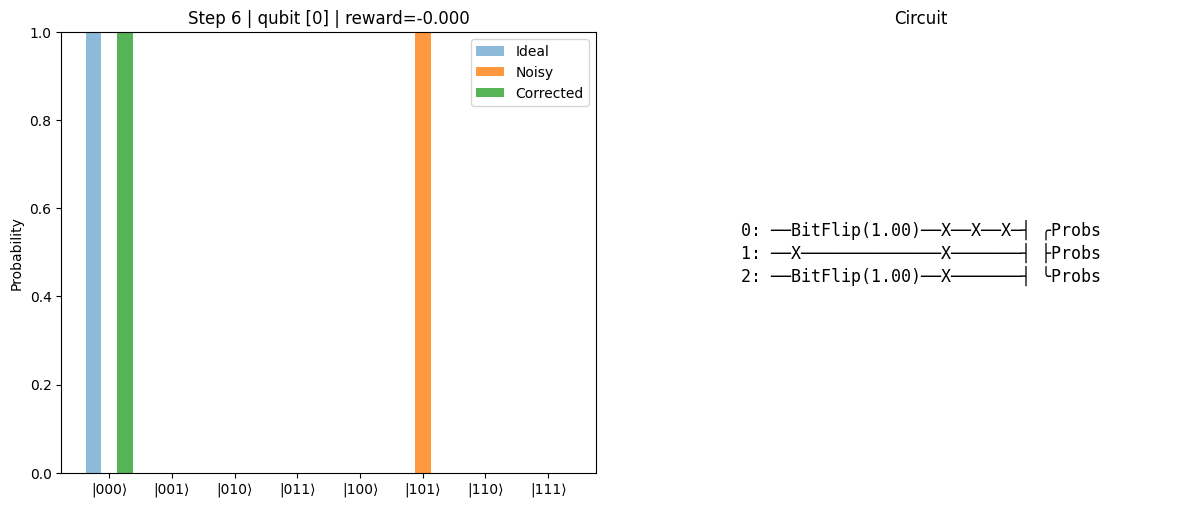
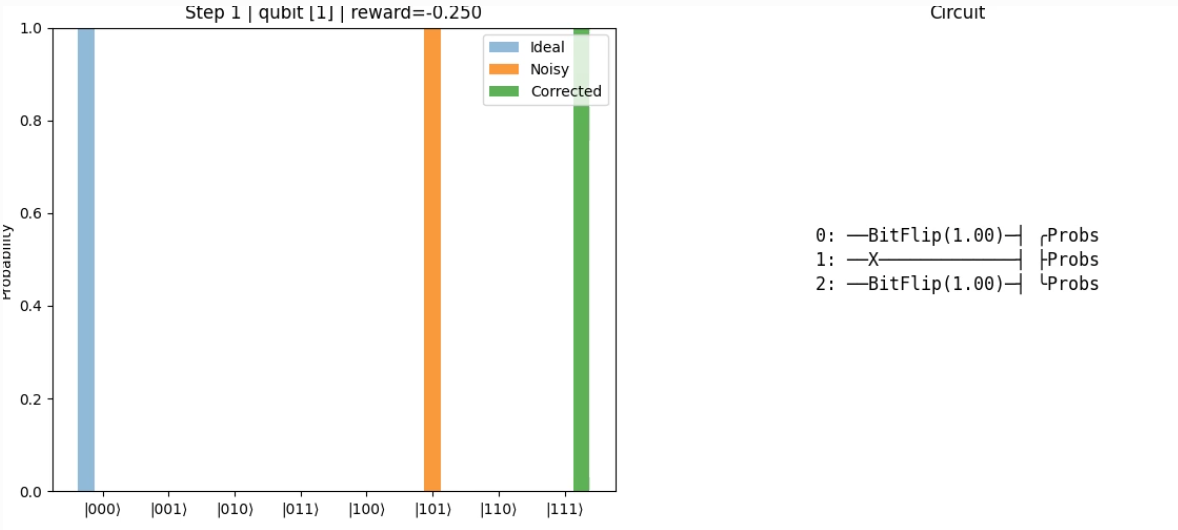
Rendering
The rendering shows a side-by-side animation with:
Left panel: Bar chart of probabilities for each basis state:
Gray = Ideal noiseless target (|0…0⟩)
Orange = Noisy distribution
Blue = Corrected distribution
The chart title updates with step number, chosen correction, and reward.
Right panel: A dynamically drawn ASCII-style quantum circuit reflecting the applied corrections.
The animation can be displayed interactively or saved as an MP4 file.
Arguments
``n_qubits`` (
int, default=3): Number of qubits in the system.``faulty_qubits`` (
dict, optional): Mapping of faulty qubit indices to their noise probabilities.``max_steps`` (
int, default=10): Maximum number of agent actions per episode.``seed`` (
int, optional): Random seed for reproducibility.``ffmpeg`` (
bool, default=False): IfTrue, uses FFmpeg for saving animations; otherwise uses Pillow (GIF).
[1]:
from qrl.env import ErrorChannelV0
# set ffmpeg=True if you have ffmpeg installed to save as mp4, or ffmpeg=False to save as gif
env = ErrorChannelV0(
n_qubits=3,
faulty_qubits={0: 1.0, 2: 1.0},
max_steps=6,
seed=42,
ffmpeg=False
)
obs = env.reset()
done = False
while not done:
action = env.action_space.sample()
obs, reward, done, info = env.step(action)
print(f"step={len(env.corrections)} act={action} "
f"reward={reward:.3f} errors={info['faulty_qubits']}")
env.render(save_path_without_extension="error_channelV0", interval_ms=700)
step=1 act=0 reward=-0.250 errors={0: 1.0, 2: 1.0}
step=2 act=1 reward=-0.250 errors={0: 1.0, 2: 1.0}
step=3 act=2 reward=-0.250 errors={0: 1.0, 2: 1.0}
step=4 act=0 reward=-0.250 errors={0: 1.0, 2: 1.0}
step=5 act=1 reward=-0.250 errors={0: 1.0, 2: 1.0}
step=6 act=0 reward=-0.000 errors={0: 1.0, 2: 1.0}